@inproceedings{10.1145/3661810.3663466,
author = {Carver, Charles J. and Itagaki, Toma and Liu, Kechen and Manik, Megan G. N. and Englhardt, Zachary and Iyer, Vikram and Zhou, Xia},
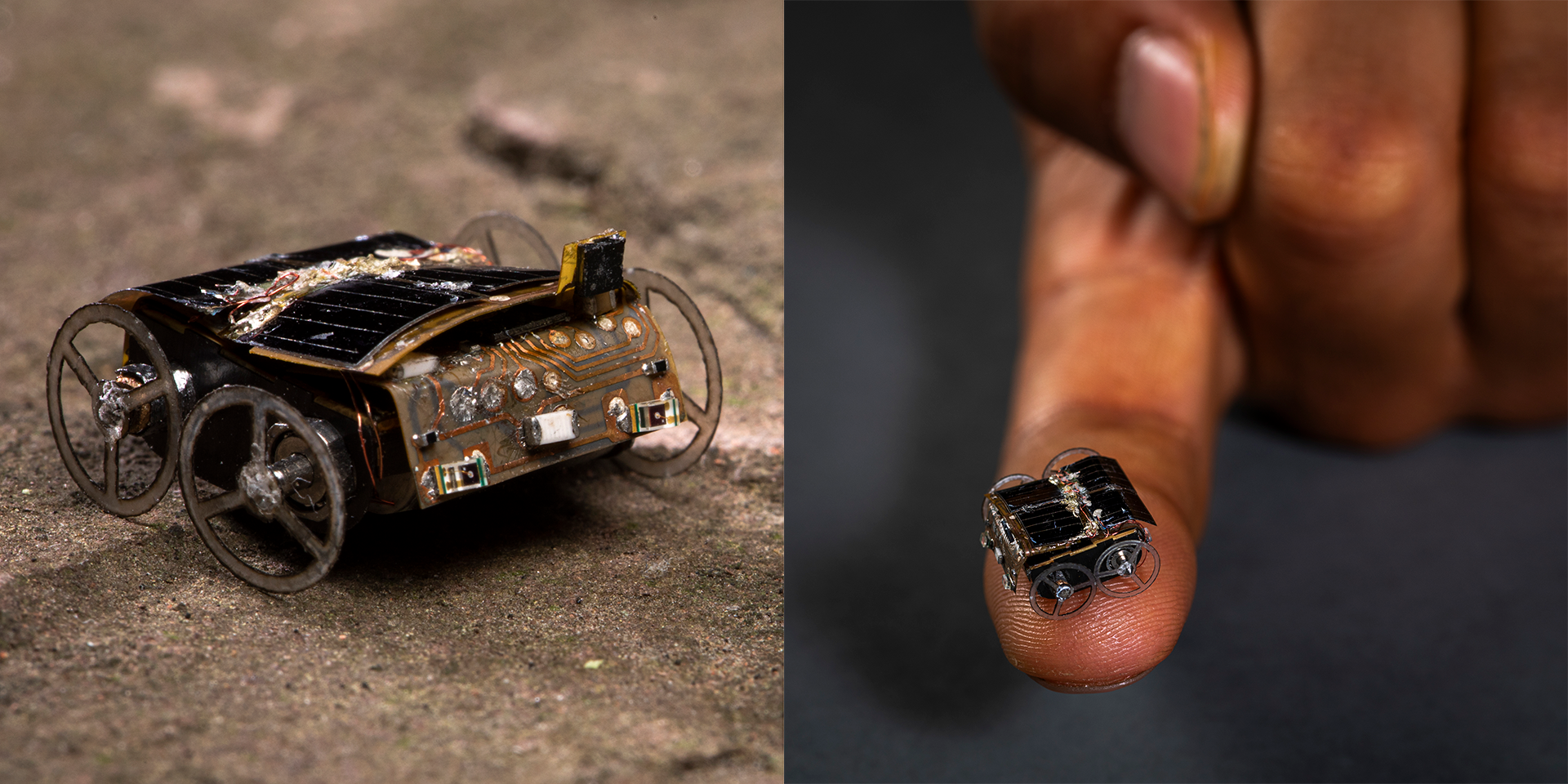
title = {Demonstration of Laser Power Delivery for Mobile Microrobots},
year = {2024},
isbn = {9798400706561},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
url = {https://doi.org/10.1145/3661810.3663466},
doi = {10.1145/3661810.3663466},
abstract = {Advances in autonomous robotic networks have allowed for many applications in communication, exploration, and monitoring. However, a major limitation in developing truly autonomous systems with robots is its operation time, often bottlenecked by the mismatch between battery capacity and power demands for motion. This challenge is especially challenging for miniature or microrobots given the limited payload they can shoulder. To combat these shortcomings, we demonstrate an integrated laser power delivery system that tracks and steers ground robots that will be capable of delivering a sufficient amount of power that could support motion, communication, and sensing. Our results independently demonstrate sufficient power delivery from the optical circuit and promising tracking error with our event camera tracking pipeline. However, the integrated system reveals future challenges in realizing a fully integrated power delivery system.},
booktitle = {Proceedings of the 10th Workshop on Micro Aerial Vehicle Networks, Systems, and Applications},
pages = {19–24},
numpages = {6},
location = {, Minato-ku, Tokyo, Japan, },
series = {DroNet '24}
}